

What are we solving for with copper-rs?
Robotics demos are improving quickly, but turning them into reliable autonomous products remains difficult. This post explores the motivation behind Copper, a Rust-based runtime for real-world autonomy systems, and explains why determinism and low-latency execution are essential for debugging and validating autonomous systems, and how Copper approaches these challenges by combining compile-time system generation, data-oriented execution, and deterministic replay.
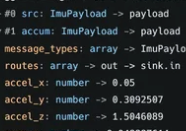
copper-rs v0.13: Unlock Full Observability
This is release 0.13 of Copper with a bunch of new observability features.
Copper Robotics Selected for Pilot Deployment at Tolle Labs
Copper Robotics has been selected by Tolle Labs for a pilot deployment within its autonomy-first aerial robotics stack. The engagement, will integrate Copper Robotics’ deterministic runtime into Tolle’s flight and autonomy systems for real-world evaluation.